 百木园
百木园背景介绍
在程序中,主线程启动一个子线程进行异步计算,主线程是不阻塞继续执行的,这点看起来是非常自然的,都已经选择启动子线程去异步执行了,主线程如果是阻塞的话,那还不如主线程自己去执行不就好了。那会不会有一种场景,异步线程执行的结果主线程是需要使用的,或者说主线程先做一些工作,然后需要确认子线程执行情况来进行后续的操作。那么这里就需要子线程异步执行完任务能把结果告诉主线程,并且主线程还能访问到子线程执行任务的状态,比如是否执行完成或正在执行中。
Future就是上面概念的抽象,按照源码中的注释,它代表着一个异步计算的结果,提供的方法中可以通过get方法获取异步线程计算的结果,如果计算还没结束,就会阻塞等待返回成功;也可以通过cancel方法取消异步计算任务;还可以通过isCancelled和isDone获得异步执行的状态;如果一个异步执行的内容并没有返回值,但是希望可以使用Future来获得取消异步计算任务的能力,可以返回null。
FutureTask
FutureTask提供了对Future的基础实现,在进入FutureTask源码之前,我们先考虑下如果要实现Future的功能可以怎么设计呢?
1,异步线程进入执行任务的时候,主线程先阻塞住,等到一步线程任务完成有返回结果了,唤醒主线程,把返回结果给它。
2,需要有个标记,记录异步线程有没有执行结束,异步线程任务执行一结束,这个标记就要变更,通过这个标记就可以知道执行状态。
3,能获取异步线程,在执行还没完成先,对异步线程可以中断,这样就可以取消异步线程执行的任务了。
4,异步线程执行和取消操作是有并发竞争的,所以应该对标记的更新做锁保护处理。
对照Future的API,大致能想到这些,实际还有大量关键细节组合才能实现。可以带这个实现思路进入源码的学习。
Task
FutureTask本身就是继承Runnable,Runnable的run方法是没有返回参数的。那么既然FutureTask需要把异步线程执行结果返回,就意味着需要把结果拿到记录。
构造函数
public FutureTask(Callable<V> callable) {
if (callable == null)
throw new NullPointerException();
this.callable = callable;
this.state = NEW; // ensure visibility of callable
}
public FutureTask(Runnable runnable, V result) {
this.callable = Executors.callable(runnable, result);
this.state = NEW; // ensure visibility of callable
}
当构造函数传的是Runnable的时候,会适配成Callable,所以对于自己的run方法需要返回结果的事那么就好办了,就是调用callable的run方法就行。我们再衍生开去看下Executors.callable(runnable, result);的实现。
public static <T> Callable<T> callable(Runnable task, T result) {
if (task == null)
throw new NullPointerException();
return new RunnableAdapter<T>(task, result);
}
static final class RunnableAdapter<T> implements Callable<T> {
final Runnable task;
final T result;
RunnableAdapter(Runnable task, T result) {
this.task = task;
this.result = result;
}
public T call() {
task.run();
return result;
}
}
这个适配没什么特殊,把一个result引用作为参数传入,然后作为结果返回。所以其实很少用这种方式来获取result,更多的是传一个null进来,因为更多的时候是想知道异步线程是否执行结束了,而不是要结果。
run方法
FutureTask既然本身就是Runnable,把它作为task提交给线程池执行,就是调用它的run方法。根据前面的分析,这个run方法需要调用内部属性callable的run获得result,然后保存result,以备get方法来获取的时候能直接返回,另外肯定也是要处理异常的场景。
以下是run方法的源码,再加上仔细关注一下状态的流转,就可以比较好的理解这个核心代码了。
public void run() {
// 【1】
if (state != NEW ||
!UNSAFE.compareAndSwapObject(this, runnerOffset,
null, Thread.currentThread()))
return;
try {
Callable<V> c = callable;
if (c != null && state == NEW) {
V result;
boolean ran;
try {
result = c.call();
ran = true;
} catch (Throwable ex) {
result = null;
ran = false;
// 【2】
setException(ex);
}
if (ran)
// 【3】
set(result);
}
} finally {
//【4】
// runner must be non-null until state is settled to
// prevent concurrent calls to run()
runner = null;
// state must be re-read after nulling runner to prevent
// leaked interrupts
int s = state;
if (s >= INTERRUPTING)
//【5】
handlePossibleCancellationInterrupt(s);
}
}
protected void set(V v) {
if (UNSAFE.compareAndSwapInt(this, stateOffset, NEW, COMPLETING)) {
outcome = v;
UNSAFE.putOrderedInt(this, stateOffset, NORMAL); // final state
finishCompletion();
}
}
protected void setException(Throwable t) {
if (UNSAFE.compareAndSwapInt(this, stateOffset, NEW, COMPLETING)) {
outcome = t;
UNSAFE.putOrderedInt(this, stateOffset, EXCEPTIONAL); // final state
finishCompletion();
}
}
private void handlePossibleCancellationInterrupt(int s) {
if (s == INTERRUPTING)
while (state == INTERRUPTING)
Thread.yield(); // wait out pending interrupt
}
- 【1】执行的起始状态必须是
NEW,初始化FutureTask的时候设置的NEW状态,如果不是NEW状态,就退出run方法;并且CAS设置runner字段为当前执行线程,设置失败表示已经设置过,就退出run方法。根据状态和CAS设置runner字段判断,确保了FutureTask实例同时只能有一个一个线程在执行。 - 【2】执行callable的run方法异常,进行
setException操作,先把状态从NEW设置成COMPLETING,设置成功后把outcome字段设置成异常结果,然后将状态设置成EXCEPTIONAL。finishCompletion方法在状态进入终态(final state)的时候都会被调用,他会唤醒等待的线程节点,是流程中的关键一环,在后续中详细分析。 - 【3】正常执行callable的run方法会获得结果,进行
set操作,老规矩,先把状态从NEW设置成COMPLIETING,设置成功后把outcome字段设置成返回结果result,以备等待线程来获取,然后把状态设置成NORMAL。NORMAL作为终态,也会调用finishCompletion方法。 - 【4】finally代码块,前面有通过判断runner是否为空来避免并发执行,所以最后把runner设置成null,这个注释好理解,在状态确定之前,Runner必须是非空的,以防止对run()的并发调用,这一点结合【1】就可以解释。第二步的注释说,状态重新读取必须在将runner设置为null之后,以防止泄漏中断,这里需要结合
cancel方法分析,cancel方法中执行的顺序是先将state修改成INTERRUPTING成功后再使用runner,这里就保证了先设置runner为null后再获取state的最新值。 - 【5】handlePossibleCancellationInterrupt方法中用一个while循环加Thread.yield()来等待state在
INTERRUPTING下变成INTERRUPTED。也就是说当cancel方法把state改成INTERRUPTING后,run方法就会等待cancel方法执行结束后自己才执行结束。
直到网上找到了这篇文章why outcome object in FutureTask is non-volatile?
这里有个很巧妙的设计,就是利用java的happends before中的传递原则,使得在不使用锁的情况下,保证其他线程读到state=NORMAL时,该线程一定能读到outcome的最新值
Task State
前面提到需要一个标记来记录任务的执行状态,源码实现中有一个volatile修饰的int类型state字段(和AQS一样的配方的感觉来了)。
/**
* NEW -> COMPLETING -> NORMAL
* NEW -> COMPLETING -> EXCEPTIONAL
* NEW -> CANCELLED
* NEW -> INTERRUPTING -> INTERRUPTED
**/
private volatile int state;
private static final int NEW = 0;
private static final int COMPLETING = 1;
private static final int NORMAL = 2;
private static final int EXCEPTIONAL = 3;
private static final int CANCELLED = 4;
private static final int INTERRUPTING = 5;
private static final int INTERRUPTED = 6;
注释提供了全部状态流转路径,核心逻辑就是一步步变更状态来进行的。
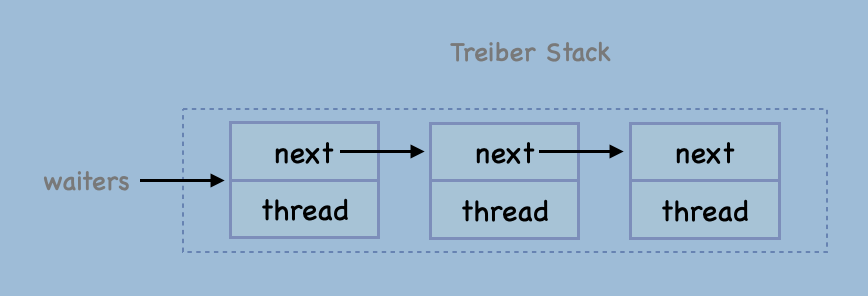
Treiber Stack
我们需要了解清楚这个Treiber Stack的概念,因为这在JUC源码很多地方有使用,有助于我们理解JUC其他组件代码的实现。
对于一个栈,我们并发往栈里放节点的时候如何处理竞争呢?比较简单的方式就是使用锁,放的时候锁,取的时候锁。
有个大佬他不想用锁,而是利用CAS并发原语设计了一个无锁堆栈,并发表了论文,他名字就叫Treiber,这个就是Treiber Stack的由来。在FutureTask的源码注释中专门提到,很多JDK源码中都用到了类似这种引用,表达这个实现是有坚实理论依据的,有一种做学术的专业氛围。
直接看《Java Concurrency in Practice》中提供的实现代码:
public class TreiberStack <E> {
AtomicReference<Node<E>> top = new AtomicReference<Node<E>>();
public void push(E item) {
Node<E> newHead = new Node<E>(item);
Node<E> oldHead;
do {
oldHead = top.get();
newHead.next = oldHead;
} while (!top.compareAndSet(oldHead, newHead));
}
public E pop() {
Node<E> oldHead;
Node<E> newHead;
do {
oldHead = top.get();
if (oldHead == null)
return null;
newHead = oldHead.next;
} while (!top.compareAndSet(oldHead, newHead));
return oldHead.item;
}
private static class Node <E> {
public final E item;
public Node<E> next;
public Node(E item) {
this.item = item;
}
}
}
这个队列在入队和出队的时候都没有进行锁操作,而是CAS设置头节点是否成功,如果设置成功表示头节点没有被修改过,就没有竞争发生,直接设置头节点,如果CAS设置失败表示有竞争发生,则字段继续,知道设置头节点成功。
其实只要记住一点,操作这个数据结构的入口集中在头节点上,原子操作头节点保证不会发生并发引起的读写数据异常的问题。
下面看一下FutureTask是如何定义这个链表节点的:
WaitNode
使用WaitNode来表示链表节点,内部有记录阻塞等待的线程和下一个节点的引用。
static final class WaitNode {
volatile Thread thread;
volatile WaitNode next;
WaitNode() { thread = Thread.currentThread(); }
}
以下是FutureTask中实现的Treiber Stack结构图:
get方法
前面已经提过,get方法是阻塞线程等待的,怎么阻塞的?多个线程都调用get方法阻塞的时候如何维护这些线程?带着这两问题继续阅读源码。
public V get() throws InterruptedException, ExecutionException {
int s = state;
if (s <= COMPLETING)
s = awaitDone(false, 0L);
return report(s);
}
public V get(long timeout, TimeUnit unit)
throws InterruptedException, ExecutionException, TimeoutException {
if (unit == null)
throw new NullPointerException();
int s = state;
if (s <= COMPLETING &&
(s = awaitDone(true, unit.toNanos(timeout))) <= COMPLETING)
throw new TimeoutException();
return report(s);
}
- 【1】状态不是终态情况下调用
awaitDone方法,是终态时调用report方法。对于有超时时间需求的情况,在到达超时时间时awaitDone方法就会返回state结果,如果还不是终态就抛出TimeoutException。
awaitDone
这个方法里实现了如果异步线程还未执行结束的时候,来调用get方法阻塞等待的能力。
private int awaitDone(boolean timed, long nanos)
throws InterruptedException {
final long deadline = timed ? System.nanoTime() + nanos : 0L;
WaitNode q = null;
boolean queued = false;
for (;;) {
if (Thread.interrupted()) {
removeWaiter(q);
throw new InterruptedException();
}
int s = state;
// 【1】
if (s > COMPLETING) {
if (q != null)
q.thread = null;
return s;
}
else if (s == COMPLETING) // cannot time out yet
Thread.yield();
// 【2】
else if (q == null)
q = new WaitNode();
else if (!queued)
queued = UNSAFE.compareAndSwapObject(this, waitersOffset,
q.next = waiters, q);
// 【3】
else if (timed) {
nanos = deadline - System.nanoTime();
if (nanos <= 0L) {
removeWaiter(q);
return state;
}
LockSupport.parkNanos(this, nanos);
}
else
LockSupport.park(this);
}
}
- 【1】首先,判断状态,如果状态大于
COMPLETING,执行全部结束,是可以拿到结果了的,就直接返回状态,如果自己线程的节点已经产生,需要把节点中的线程设置为null,注意这里并没有执行删除节点的操作。如果刚好处于COMPLETING状态,说明计算已经结束,正在进行结果或执行异常的设置,这个操作非常快,那就再等等(Thread.yield())。另外,这里可以想象COMPLETING状态是一个非常短暂的状态,所以是放在后面判断的,一般代码都以主意这种细节。 - 【2】通过前面两个判断表示还未执行结束,那么就需要进入等待了。进入等待前,先要往链表里放节点,如果链表还没节点,就
new WaitNode()初始化一个节点,然后再下次循环的时候放入链表,放入的方式就是CAS比对头节点(waiters)是否变化设置。 - 【3】阻塞线程就是调用
LockSupport.park方法阻塞线程,有阻塞就会有唤醒,正常唤醒线程的时候就是计算结束的时候,那么就会执行【1】的逻辑,退出循环;异常的唤醒有可能是线程发生中断,前面代码中对线程中断标记的处理,会移除节点(removeWaiter)并抛出异常。另外,超时情况发生的时候,也会移除节点。
finishCompletion
这个方法在任务执行结束或取消的时候执行,前面提到过的其中执行结束的两种情况是正常执行结束和异常结束。它需要把等待的节点中的线程全部唤醒,在了解了链表结构后,我们看一下这个唤醒操作的代码:
private void finishCompletion() {
// assert state > COMPLETING;
for (WaitNode q; (q = waiters) != null;) {
if (UNSAFE.compareAndSwapObject(this, waitersOffset, q, null)) {
for (;;) {
Thread t = q.thread;
if (t != null) {
q.thread = null;
LockSupport.unpark(t);
}
WaitNode next = q.next;
if (next == null)
break;
q.next = null; // unlink to help gc
q = next;
}
break;
}
}
done();
callable = null; // to reduce footprint
}
遍历节点前会先用CAS的方式将头设置成null,成功设置才能继续,所以这里有两个for循环,第二个for循环是遍历链表,找出Thread不为空的节点,用LockSupport.unpark唤醒,被唤醒的线程会从awaitDone的park处醒来继续执行。
其中留了一个done()方法提供给子类扩展,很多字类实现了这个扩展,比如说guava的ListenableFutureTask。
removeWaiter
在awaitDone方法中的循环中,判断出线程有中断标记的时候会执行removeWaiter,还有就是get超时也会触发。
private void removeWaiter(WaitNode node) {
if (node != null) {
node.thread = null;
retry:
for (;;) { // restart on removeWaiter race
for (WaitNode pred = null, q = waiters, s; q != null; q = s) {
s = q.next;
if (q.thread != null)
pred = q;
else if (pred != null) {
pred.next = s;
if (pred.thread == null) // check for race
continue retry;
}
else if (!UNSAFE.compareAndSwapObject(this, waitersOffset,
q, s))
continue retry;
}
break;
}
}
}
一个链表中并发删除随机节点自然会有冲突问题,比如同时删除的节点为相邻节点,前面的节点的next可能只想null导致链表断裂。那么这里是如何避免这种问题的呢?
首先,这个方法进入的时候第一步就会把节点的thread设置为null,实际这个操作是可以作为当前线程正在删除这个节点的标记,其他线程只要判断节点是否为null就可以推算出可能有线程正在删除这个节点。
其次,每个节点都会先判断thread是否为空,不为空则会设置给pred,也就是说pred只要有节点这个节点在从节点移除前thread都是不为空的,如果判断出节点的thread为空,那么就跳过判断进入下一个节点的判断,那么这个节点就自然链表中移除了,因为上一个节点的next会指向到thread不为空的下一个节点(pred.next = s)。当next指向后,会再判断pred的thread是否为空,如果是为空就表示可能有线程并发操作,这里就直接从头循环链表。
最后,前两个判断都不成立的情况只有一种那就是头节点的thread为空的情况,此时就要用cas的方式来处理如果设置失败,和前面操作链表一样自旋即可。
cancel
public boolean cancel(boolean mayInterruptIfRunning) {
// 【1】
if (!(state == NEW &&
UNSAFE.compareAndSwapInt(this, stateOffset, NEW,
mayInterruptIfRunning ? INTERRUPTING : CANCELLED)))
return false;
// 【2】
try { // in case call to interrupt throws exception
if (mayInterruptIfRunning) {
try {
Thread t = runner;
if (t != null)
t.interrupt();
} finally { // final state
UNSAFE.putOrderedInt(this, stateOffset, INTERRUPTED);
}
}
} finally {
//【3】
finishCompletion();
}
return true;
}
-
【1】第一个判断就是要求状态必须是NEW,如果任务已经开始执行,那么直接就返回false。如果调用cancel方法时状态是NEW,那么直接对这个状态进行CAS修改,如果传参值mayInterruptIfRunning未true,那么状态先改成INTERRUPTING,然后改成INTERRUPTED;如果传参值是true,状态修改为CANCELLED,直接进入终态。这一步修改动作也可能失败,失败意味着装已经从刚刚的NEW发生了变化,那么就不能在进行cancel操作了,直接返回false。
-
【2】上面的代码执行成功,意味这状态成功从NEW改成了INTERRUPTING或CANCELLED。
- 如果传参为true,此时状态必然已经是INTERRUPTING,然后就开始进行线程中断操作,并最终将状态变更为INTERRUPTED。
- 如果传参为false,此时状态为CANCELLED,已是终态,返回true即可
-
【3】无论是INTERRUPTED还是CANCELLED的结果,都会执行finishCompletion方法,该方法前面已详细解析。
后记
《Netty实战》中有写到JDK中Future所提供的实现只允许手动检查对应的操作是否完成,或者一直阻塞知道它完成。这是非常烦琐的,所以Netty提供了自己的实现,所以下一站,ChannelFuture。
参考
https://yangsanity.me/2021/07/27/FutureTask/
https://en.wikipedia.org/wiki/Treiber_stack
https://www.cnblogs.com/iwehdio/p/14285282.html
来源:https://www.cnblogs.com/killbug/p/16441226.html
本站部分图文来源于网络,如有侵权请联系删除。